


川崎机器人手/自动模式切换
1、控制器上的示教/再现切换为示教模式、示教器上的示教/再现切换为示教模式,此时为手动模式,允许手动移动机器人及编辑机器人程序。
2、控制器上的示教/再现切换为再线模式、示教器上的示教/再现切换为再现模式,此时为自动模式,不允许手动移动机器人及编辑机器人程序,允许通过示教器或者外部信号使得机器人自动运行已经编辑好的工作程序。(自动模式下允许机器人输出通用IO输出信号)。
手动移动川崎机器人
在机器人手动模式下,通过按下组合按键,“A+运行”、“A+马达开”,使得示教器上的“RUN”、“MOTOR”高亮显示后,如下操作移动机器人:
1、手动速度选择
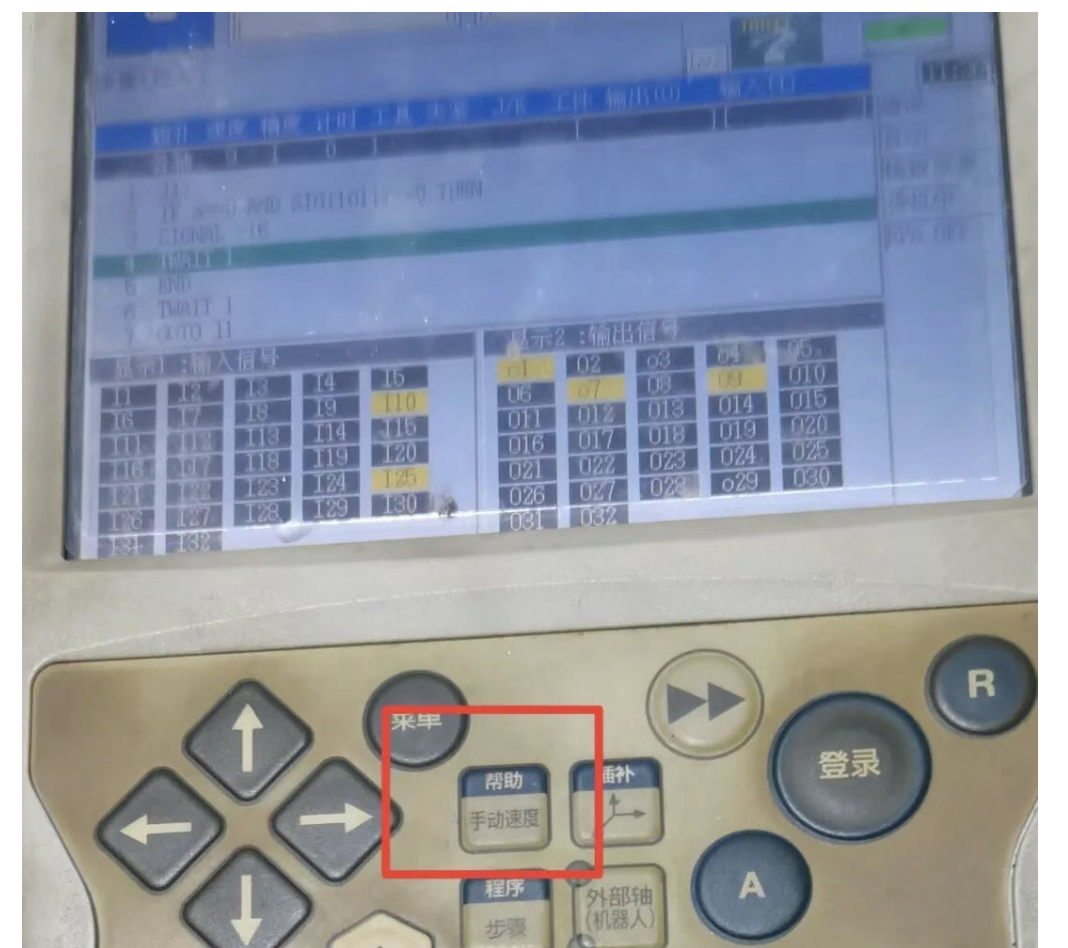
直接按下“手动速度”按键,(速度1-2-3-4-5-1循环切换)。需要接近目标位置精准调试时,建议手动速度倍率在3以下调试,在空旷的位置需要快速手动移动机器人时,建议速度倍率选择在5位置,使得机器人快速移动到我们需要的位置。
2、坐标系选择:
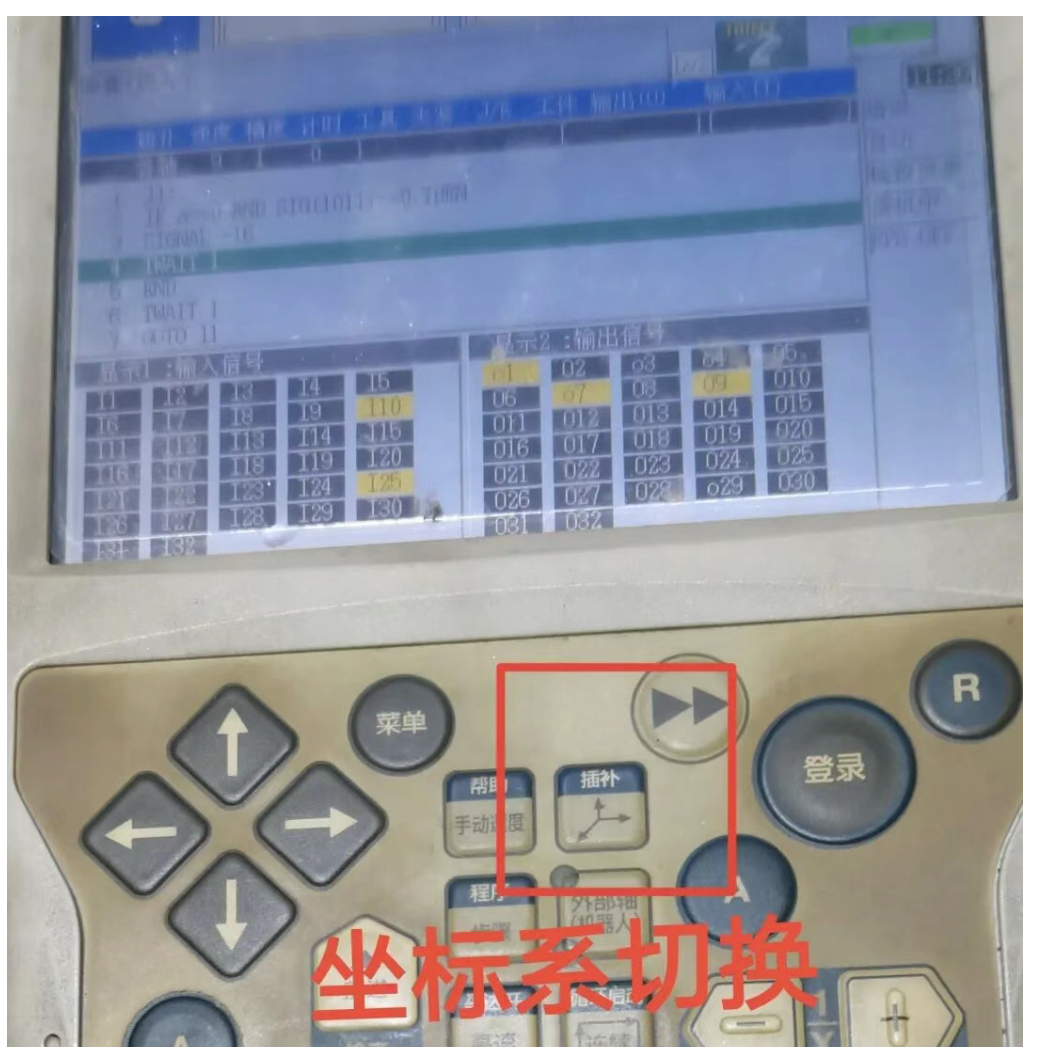
关节坐标(JOINT各轴单独移动)、基坐标(base直线移动)、工具坐标(TOOL工具坐标系移动)可循环切换。
3、使能握杆握下:
轻握示教器反面的3位置握杆开关在中间位置,听到“咔”声响,表示握杆成功,此时机器人马达上电。
4、机器人移动:
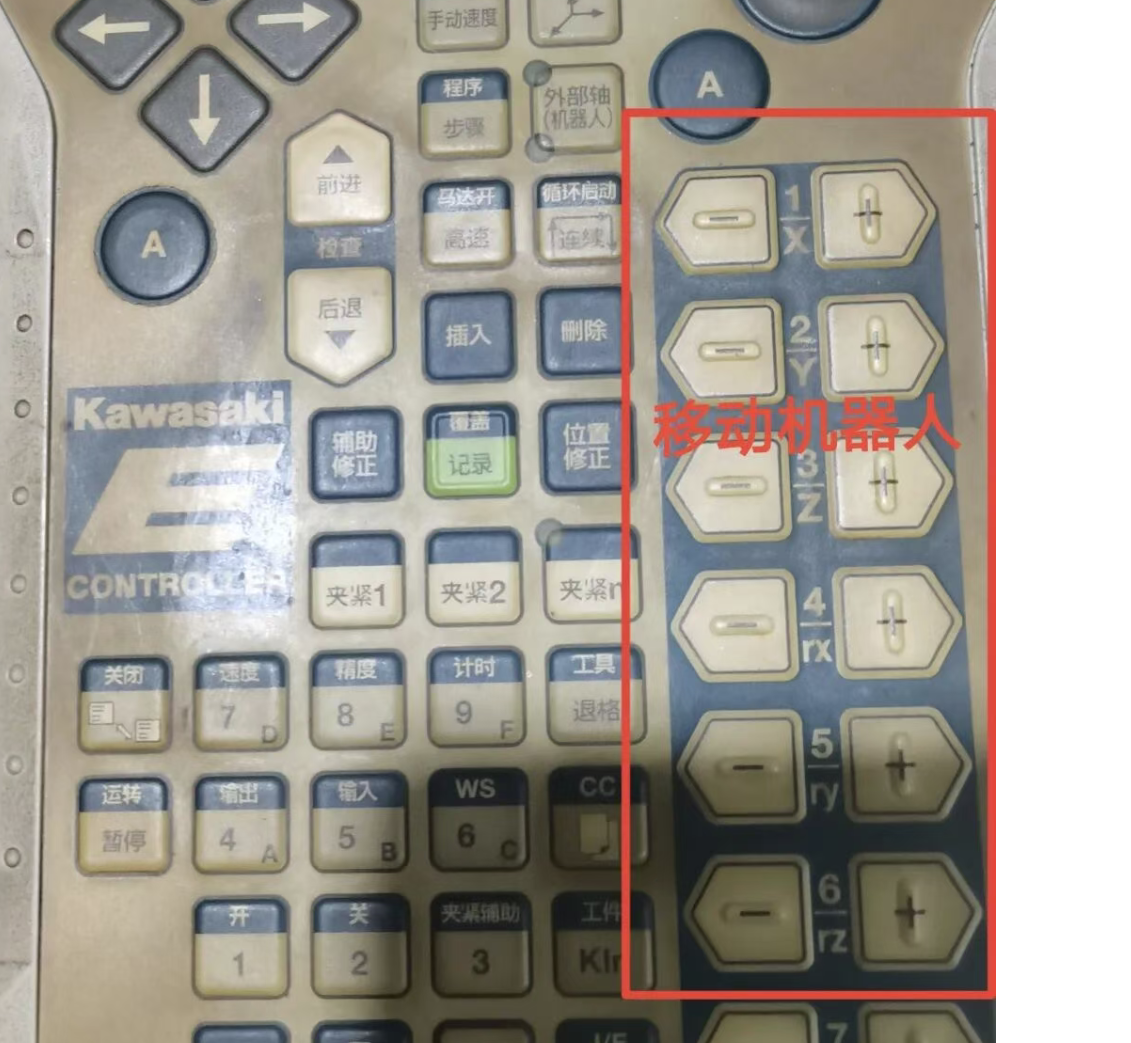
按住示教器背面的使能按键同时,按下X-/X+、Y-/Y+ 、Z-/Z+ 、 RX-/RX+、RY-/RY+ 、RZ-/RZ+ ,机器人将分别在选择的坐标系下移动机器人。
更多资讯:川崎机器人
