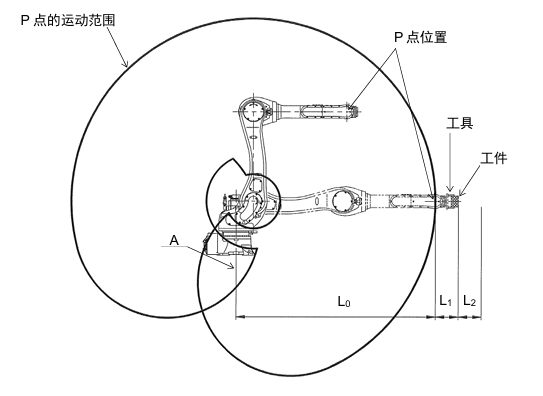
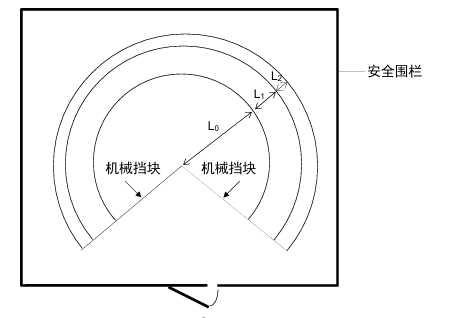
川崎机器人的由运动范围决定安全围栏的位置:
如果把下图的P点的运动范围作为机器人的运动范围,那么,Lo:机器人的运动范围(请参阅"3.2机器人的运动范围与规格"。)L:手腕法兰、工具、工件三者长度之和
L2:安全空间
应保证安全围栏的尺寸为从手臂的中心(下图的A点)大于Lo+Li+L2。
更多资讯:川崎机器人


 联系方式新闻分类友情链接
联系方式新闻分类友情链接