当川崎机器人安装的位置互相之间很接近时,它们的工作范围可能会重叠。这时,就需要机器人之间相互联锁。
比如,下图中的阴影部分表示机器人A和B的干涉区域
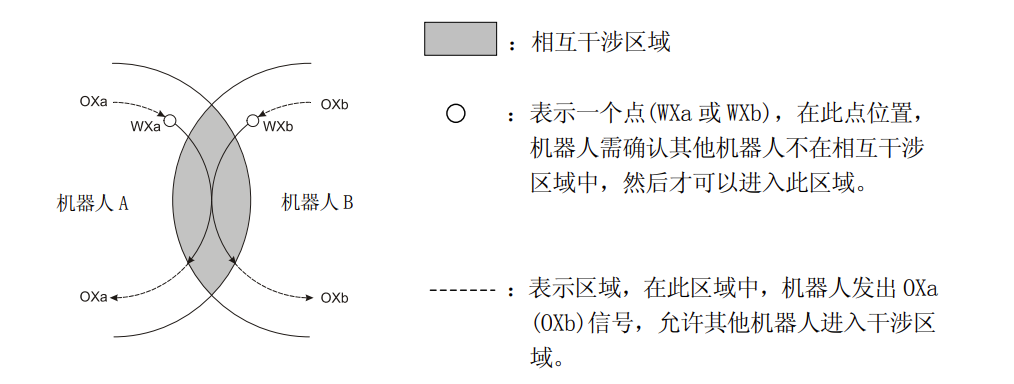
从机器人 A来看,
1.机器人A在进入干涉区域前,先检査 WXa来确认机器人B是否已离开干涉区(机器人 B发 0Xb 信号)。
2.当机器人A离开干涉区域后,发出0Xa信号,允许机器人B进入干涉区
互锁电路举例:
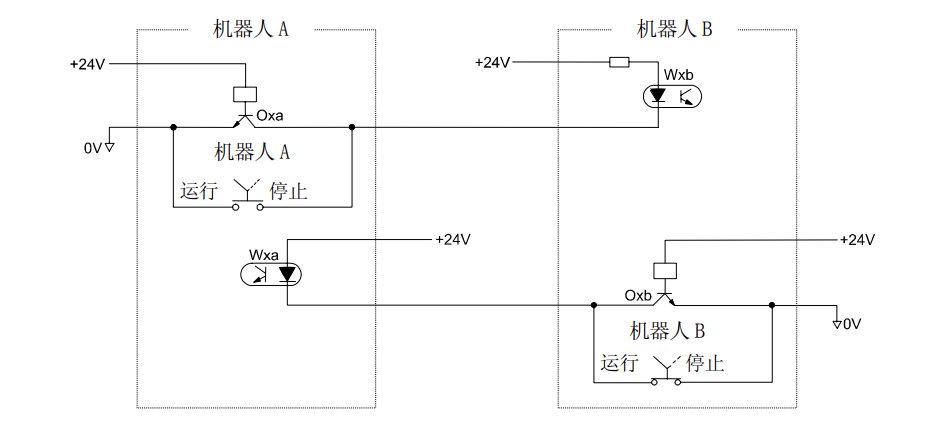
[注意]
上面的运行/停止开关不是真的为机器人准备的。这里说的机器人A和B仅仅是为容易理解而给出的例子。
更多资讯:川崎机器人


 联系方式 联系方式
新闻分类
站内搜索 友情链接
|
新闻中心 |
