


在一体化示教中,以下信息通过示教器同时被示教在各步骤中。
机器人手臂的位姿数据
2辅助数据(插补、速度、精度,夹紧,工具和通用 I/0(0X/WX)信号)
在一体化示教中被示教的通用信号叫做 0X(输出)和 WX(输入)信号。当执行这个一体化示教的程序时,0X 和 WX的时序如下例所示。
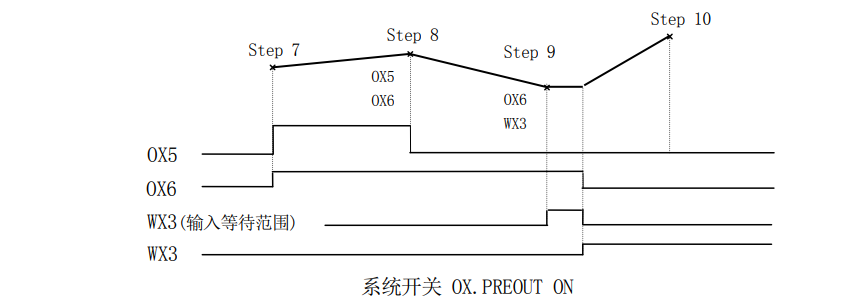
如果 0X5 被示教在第8步中:
1.当机器人到达第7步的精度范围内,并开始移向第8步示教点时,0X5 被开为 ON。
当机器人到达第8步的精度范围内,并开始移向第9步的示教点时,0X5 被关断为 OFF,2.
因其没有被示教在第9步中。
如果 0X6 被示教在第8步和第9步中:
1.当机器人到达第7步的精度范围,并开始移向第 8步的示教点时,0X6 被开为 ON。2.当机器人到达第8步的精度范围,并开始移向第9步的示教点时,0X6保持为ON,因其也被示教在第 9步中。
正常情况下,一旦机器人到达第9步的精度范围,机器人开始移向第 10 步的示教点时3.0X6 立即变为 OFF(因第 10 步中没有示教 0X6)。在这个例子中,无论怎样,控制器等待WX3 的输入,因 WX3 被示教在第9步中。直到 WX3 被输入,第9步才切换到第 10 步。当 WX3 被输入时,步骤切换到第 10 步,同时 0X6 变为 OFF。A.
如果 WX3 被示教在第 9 步中:
当机器人到达第9步的精度范围时,它等待WX3输入。
当 WX3 已被输入时,机器人移向第 10 步的示教点。如果 WX3 未被输入,到其被输入为止机器人将在第9步上待命。
注意:
一旦当机器人由于马达电源 OFF、循环启动 OFF或暂停而停止运作时,0X信号变为 OFF。重启动后,再次变为ON。
当机器人到达一个示教步骤时,就从一步切换到下一步,但其并不总与示教点完全一致。这取决于此示教步的精度数据。精度设定得越高,切换点靠示教点将越近。设定得越不精确,步骤切换越早。因此,要注意 I/0时序的改变取决于那个步骤示教的精度范围。
