


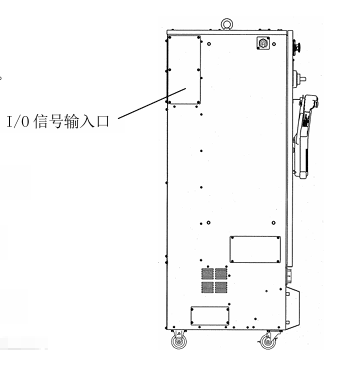
川崎机器人 当用1TW板上的连接器CN2和CN4连接I/0信号到外围控制设备时,机器人能与外围设备或其他机器人同步运转。(CN2,CN4的电缆侧的连接器是选件。)
1、插入电缆到控制器左侧的 I/0 信号输入口。1,安装电缆的例显示如下。
(1)在板上开个适于密封接头的孔。
(2)在密封接头中穿入电缆。
(3)电缆穿入孔后,拧紧密封接头的螺帽,
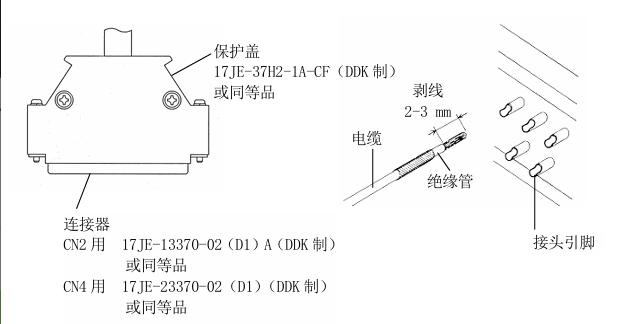
2、拆下CN2,CN4用连接器的盖,并给通用信号配线。
3、焊接接头引脚。
4、剥去电缆前端的涂层 2-3mm,并把焊料放在线的末端,
5、L6焊接电缆到接头引脚上。
6、用绝缘软管套在接头引脚上。

7.接线完毕后,装回连接器的盖并紧固电缆。
8.插入连接器到 1TW 板上,并用两端的螺钉来固定。
更多资讯:川崎机器人
